Глава 6.Автоматические регуляторы
6.1.Общие сведения и классификация
Автоматический
регулятор (АР) представляет собой устройство, присоединяемое к объекту
регулирования (ОР) для автоматического регулирования его выходной величины,
выбранной в качестве регулируемой. АР образует главную обратную связь с САР.
Выходной величиной АР является регулирующее воздействие ур (перемещение регулирующего
органа); входной -у -отклонение регулируемой
величины от заданного значения; главным возмущением АР является
изменение задания (рис.27).
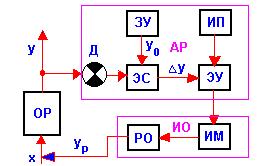
Рис.27 – Структурная схема регулятора
Основными
функциональными элементами АР являются: чувствительный элемент или
датчик Д, измеряющий действительное значение
выходной величины объекта регулирования; задающее устройство (задатчик) ЗУ; элемент сравнения (сумматор) ЭС,
определяющий отклонение регулируемой величины от задания; усилительный элемент ЭУ
с источником питания ИП и исполнительный орган ИО, состоящий
из исполнительного механизма ИМ и регулирующего органа РО. Кроме перечисленных, Ар может содержать различные
корректирующие элементы, улучшающие качество регулирования.
По
способу действия АР подразделяются на регуляторы прямого и непрямого действия. Регуляторы
прямого действия являются простейшими регуляторами. Они приводятся в
действие усилием, развиваемым измерительной системой АР при изменении
величины регулируемого параметра, они не имеют специальных усилителей и
источников питания для них. В регуляторах непрямого действия усилие,
развиваемое чувствительным элементом при изменении регулируемого параметра,
усиливается по величине и мощности усилителем за счет постороннего источника
энергии.
Всякий
регулятор из-за трения в подвижных системах обладает некоторой
нечувствительностью. Поэтому регулятор приходит в действие лишь после
отклонения регулируемого параметра от заданного значения на определенную
конечную величину. Удвоенную величину наименьшего отклонения регулируемой
величины, при котором приводится в действие регулирующий орган, называют зоной
нечувствительности регулятор. Нечувствительность равна минимальной величине
рассогласования, после наступления которой регулятор
приходит в действие. Например, если при регулировании давления заданным
значением является 100 кгс/см2 ,
а нечувствительность регулятора 1кгс/см2, то при отклонении давления
в ту или другую сторону меньше чем на 1кгс/см2 регулятор будет
бездействовать. Он придет в действие при достижении давления 101 кгс/см2
(при увеличении давления) или 99 кгс/см2 ( при
уменьшении давления). Область ±1 кгс/см2 и
является зоной нечувствительности (или чувствительности) регулятора.
Чувствительность регуляторов непрямого действия выше, чем прямого действия.
Регуляторы также классифицируются по виду используемой энергии: пневматические,
гидравлические, электрические, комбинированные; по характеру воздействия на
регулирующий орган- на регуляторы прерывистого
(дискретного) и непрерывного действия; по роду регулируемого параметра -
регуляторы температуры, давления, разрежения, расхода, уровня, состава и
содержания вещества и т.п.; по конструктивному исполнению -приборные,
аппаратные, агрегатные и модульные или элементные; по числу регулируемых
величин -одноканальные и многоканальные; по количеству
сигналов, поступающих на вход регулятора - одноимпульсные, двухимпульсные
и т.д., и ряду других признаков.
6.2.Законы регулирования
Закон
регулирования - это алгоритм функционирования, выражающий связь во времени
между регулирующим воздействием регулятора ур
и изменением выходной величины объекта, являющейся входной величиной для
регулятора хр. Обычно рассматриваются идеализированные
теоретические законы без учета инерционности. Законы регулирования АР
непрерывного действия по отклонению представляют собой линейные
дифференциальные уравнения. Серийные промышленные регуляторы по их закону
регулирования делятся на следующие типы:
** статические или
пропорциональные или П - регуляторы;
** астатические или интегральные
или И - регуляторы;
** изодромные
или пропорционально-интегральные или ПИ - регуляторы;
** пропорциональные с предварением
или пропорционально - дифференциальные или ПД - регуляторы;
** изодромные
с предварением или с первой производной или
пропорционально-интегрально-дифференциальные или ПИД - регуляторы;
** позиционные или релейные или Р - регуляторы.
Регуляторы непрерывного действия
используют линейные законы регулирования вида:
![]()
где yp
-выходная величина регулятора;
xp -его входная величина;
C1, C2, C3
-коэффициенты пропорциональности, называемые параметрами настройки регулятора.
Отдельные
составляющие могут отсутствовать, при
этом образуются П-,И-, ПИ-, ПИД-законы
регулирования. Работа регулятора при выбранном законе регулирования зависит от
значений коэффициентов C1, C2, C3
, входящих в его уравнение. Конструкция каждого серийного регулятора со
стандартными законами регулирования позволяет изменять значение этих
коэффициентов у каждой составляющей в широком диапазоне. Это позволяет получать
требуемый характер переходного процесса при регулировании на объектах с
различными динамическими свойствами и расширяет область применения регулятора
каждого конкретного типа. Поэтому каждый промышленный регулятор снабжается
специальными приспособлениями для изменения значения этих коэффициентов, т.е.
для настройки регулятора по динамическим характеристикам объекта регулирования.
Из регуляторов с нелинейным законом регулирования наиболее широкое применение
находят двух- и трехпозиционные регуляторы релейного действия.
6.3.Статические или П-регуляторы
Статические или пропорциональные
регуляторы типа П-это простейшие регуляторы с линейной характеристикой,
описываемой уравнением усилительного звена:
yp=Kp·xp,
где Kp-коэффициент передачи (усиления)
регулятора. У П-регулятора величина перемещения регулирующего органа yp пропорциональна отклонению
регулируемого параметра. Это значит, что каждому значению регулируемого
параметра в пределах зоны регулирования соответствует определенное положение
регулирующего органа. Пропорциональная зависимость между перемещением
регулирующего органа и отклонением регулируемой величины от ее заданного
значения в П-регуляторах достигается за счет действия жесткой обратной
связи. Поэтому П-регуляторы называются также регуляторами с жесткой
обратной связью. АФЧХ регулятора W(jω)=Kp. Статический коэффициент передачи Kp является параметром настройки регулятора.
Это значит, что величина перемещения регулирующего органа при отклонении
регулируемого параметра на 1% может быть установлена заранее и в каждом
отдельном случае ее определяют расчетом или экспериментально при настройке
системы.
Величина
обратная коэффициенту передачи δ=1/ Kp
называется статизмом или коэффициентом
неравномерности регулятора, который тоже можно считать параметром настройки.
Величина δ, выраженная в %, называется диапазоном дросселирования (зоной регулирования). П-регуляторы
снабжаются устройством, при помощи которого может быть установлен диапазон дросселирования (предел пропорциональности). Пределом
пропорциональности называется участок шкалы регулятора, выраженный в % всей шкалы, в пределах которого изменение регулируемого
параметра вызывает перемещение регулирующего органа из одного крайнего
положения в другое. Чем больше предел пропорциональности, тем на меньшую
величину перемещается регулирующий орган при одном и том же изменении
параметра. Например, в регуляторах с пределом пропорциональности 60% отклонение
указателя регулятора на 60% шкалы вызовет полное перемещение регулирующего
органа (клапана) из одного крайнего положения в другое, а отклонение указателя
на 1% перемещает клапан на 1/60 его полного хода.

Рис.28 – Переходной процесс П-регулятора
Автоматический П-регулятор в сочетании со статическим объектом образуют
статическую САР, у которой установившееся значение регулируемой величины
y зависит от нагрузки Q. Переходная характеристика П-регулятора
приведена на рис.28. Как видно П-регулятор при изменении нагрузки на
объект не полностью устанавливает заданное значение регулируемого параметра,
имеется так называемое остаточное отклонение параметра Δy,
или остаточная ошибка. С увеличением статизма растет
и статическая погрешность регулирования, поэтому обычно стремятся уменьшить статизм увеличением коэффициента передачи регулятора.
Однако, это уменьшает устойчивость САР. Выход
из положения- применение регуляторов с более сложным
законом регулирования, или же автоматическая коррекция САР. Поэтому П-регуляторы
можно применять там, где по техническим условиям при функционировании САР на
объекте регулирования допускается наличие статической ошибки регулирования.
Наряду с П-регуляторами прямого действия достаточно широко применяются
регуляторы непрямого действия, используемые ввиду их простоты, как
универсальные регуляторы самых различных технологических процессов.
6.4.Астатические или И-регуляторы
Автоматические
регуляторы, у которых при отклонении регулируемого параметра от заданного
значения регулирующий орган перемещается со скоростью, пропорциональной
отклонению регулируемой величины, называется астатическим. Астатический
регулятор поддерживает постоянное установившееся значение регулируемой величины
вне зависимости от нагрузки объекта. При отклонении регулируемой величины от
заданного значения астатический регулятор будет перемещать регулирующий орган
до тех пор, пока не восстановится значение регулируемой величины на уровне
задания. После того, как параметр отклонится от заданного значения, например, в
сторону повышения, астатический регулятор перестанет учитывать направление
изменения параметра. Так, если в переходном режиме параметр понижается,
регулирующий орган все равно будет перемещаться в ту же сторону. Изменение
направления движения регулирующего органа произойдет тогда, когда параметр,
изменяясь, перейдет через заданное значение.
Важнейшей особенностью
астатического регулятора непрерывного действия является то, что скорость
перемещения регулирующего органа пропорциональна сигналу рассогласования
(величине отклонения регулируемой величины от заданного значения). На основании
этого закон регулирования астатического регулятора может быть описан следующим
уравнением
![]()
где Kp1=1/Tим -скорость
исполнительного механизма (или коэффициент передачи астатического регулятора);
Tим -коэффициент пропорциональности,
представляющий собой время исполнительного механизма, определяемое временем
перемещения регулирующего органа из одного крайнего положения в другое;
yp -регулирующее воздействие;
xp -сигнал рассогласования (отклонение регулируемой величины от ее
заданного значения).
Знак в правой части уравнения зависит от того, должен ли с ростом
регулируемой величины регулирующий орган открываться или закрываться. Положительной
особенностью И-регулятора является
регулирование без остаточного отклонения регулируемой величины и его статизм рнулю. АФЧХ И-регулятора W(jω)=Kp1 / jω
.
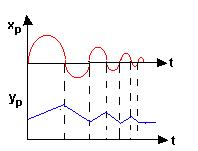
Рис.29 –Переходной процесс И-регулятора
Переходная
характеристика астатического регулятора показана на рис.29. Астатический
регулятор, стремясь привести систему к равновесию, изменяет регулирующее
воздействие yp. Но так как
система обладает инерцией, то возможно отклонение регулируемой величины в
сторону, противоположную рассогласованию. Такое отклонение регулируемой
величины в противоположную сторону называется перерегулированием.
Перерегулирование увеличивает время переходного процесса и ухудшает
динамические качества процесса регулирования И-регулятором.
Недостатком астатических регуляторов является относительно невысокая скорость
регулирования (при отклонении регулируемой величины регулирующее воздействие на
объект нарастает довольно медленно). Из-за склонности И-регуляторов
к перерегулированию их следует применять в системах с самовыравниванием, с
небольшим запаздыванием и с небольшими возмущениями. Обычно они применяются в САР
в комплекте с регуляторами, формирующими другие законы регулирования, например
с П-регуляторами.
6.5.Изодромные или ПИ - регуляторы
Одним
из средств повышения качества регулирования является использование в автоматическом
регуляторе устройства обратной связи, которая осуществляется не по положению
регулирующего органа, как у П -регуляторов, а
по скорости его перемещения. В этом случае действие обратной связи полностью
проявляется в переходном процессе регулирования и затем исчезает (снимается) в
установившемся режиме, вследствие чего автоматический регулятор с обратной
связью по скорости перемещения регулирующего органа не имеет остаточной
неравномерности. Такая, временно действующая, обратная связь называется упругой
или изодромной, а регуляторы с упругой обратной
связью - изодромными. Изодромные
регуляторы обладают одновременно свойствами пропорциональных и астатических
регуляторов и поддерживают регулируемый параметр без остаточного отклонения. При отклонении регулируемой величины от заданного значения изодромный регулятор в начальный момент времени перемещает
регулирующий орган на величину, пропорциональную величине отклонения, но если
при этом регулируемая величина не достигнет заданного значения, регулятор будет
продолжать перемещать регулирующий орган, но уже со скоростью пропорциональной
величине оставшегося отклонения до тех пор, пока регулируемая величина не
достигнет заданного значения. Действие регулятора с упругой обратной
связью можно рассматривать как совместное действие статического и астатического
регуляторов. Закон регулирования регулятора с упругой обратной связью может
быть описан уравнением
![]()
Обычно
принимают Kp1=Kp/Tи , где Tи
-время упругой обратной связи, называемое временем изодрома
- коэффициент, имеющий размерность времени и характеризующий интенсивность
введения интеграла в закон регулирования. С учетом этого уравнение регулятора
примет вид:
![]()
А его АФЧХ W(jω)=Kp(1+1/ (jωTи).
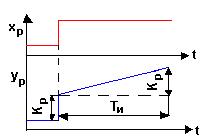
Рис.30 – Переходной
процесс ПИ-регулятора
Переходной
процесс ПИ -регулятора показан на рис.30. Из переходного процесса
следует, что регулирующее воздействие за время t=Tи удваивается, т.е. интегральная
составляющая регулирующего воздействия достигает величины пропорциональной
составляющей за счет действия упругой обратной связи. На этом основании время изодрома иногда на называется
временем удвоения. Таким образом, регулирующий орган изодромного
регулятора принимает положение, зависящее от величины регулируемого параметра,
т.е. он действует вначале как пропорциональный регулятор. Затем регулирующий
орган совершает дополнительное перемещение, необходимое для ликвидации оставшегося
отклонения регулируемой величины от задания. Пропорциональное действие в
регуляторах происходит немедленно, изодромное -
замедленно. Коэффициент передачи Kp
и время изодрома Tи(иногда 1/
Tи -скорость изодрома)
являются параметрами настройки. Регуляторы этого типа повышают устойчивость
системы; они пригодны для объектов как с
самовыравниванием так и без него, с малыми коэффициентами емкости, а также при
наличии переходного запаздывания и большими возмущениями.
6.6. ПД- и ПИД - регуляторы
Процесс
регулирования может быть улучшен за счет использования в качестве входа
регулятора сигнала, который зависит от скорости изменения регулируемого
параметра. В начальный момент возмущения скорость отклонения регулируемой
величины более значительна, чем само отклонение. Поэтому использование скорости
отклонения регулируемой величины в качестве дополнительного входного сигнала
регулятора означает введение в закон регулирования предваряющего воздействия,
которое в ряде случаев улучшает процесс регулирования. Такие регуляторы
называются регуляторами с предварением. Закон регулирования ПД - регулятора
имеет вид:
yp=Kp(x
+ Tд ·dx/dt) , АФЧХ W(jω)=Kp(1+ Tдjω),
где Tд- время
предварения.
Благодаря применению
дополнительного воздействия время переходного процесса (рис.31,а) и амплитуда
колебаний регулируемой величины в переходном процессе этого регулятора
существенно уменьшаются.
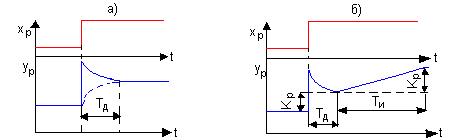
Рис.31 –Переходные процессы ПД-
(а) и ПИД-регуляторов (б)
Для
объектов регулирования, у которых часто и резко меняется нагрузка и велико
запаздывание, применяются изодромные регуляторы, у
которых дополнительно вводится воздействие по производной регулируемой
величины. В результате получается пропорционально - интегрально -
дифференциальный или ПИД - регулятор, с законом регулирования
![]()
Обозначив коэффициенты в уравнении
(39) как Kp1=Kp /Tи , Kp2=Kp
·Tд , получим
![]()
Переходной
процесс ПИД - регулятора показан на рис.31,б; параметрами настройки
являются Kp- статический
коэффициент передачи; Tи
- время изодрома; Tд
- время предварения. Введение производной в закон регулирования
компенсирует инерционное запаздывание в работе регулятора и увеличивает
быстродействие САР.
Контрольные вопросы
1.Перечислите, по каким основным признакам классифицируются автоматические
регуляторы.
2.Что понимается под "законом регулирования"?
3.Приведите уравнение стандартного линейного закона регулирования.
4.Что понимается под временем изодрома?
5.Приведите переходные характеристики стандартных регуляторов и дайте им
объяснение.